ISO 18646-6-2026 机器人技术——服务机器人的性能标准及相关测试方法第6部分
VIP专享

机器人技术——服务机器人的性能
标准及相关测试方法
第6部分:
下肢可穿戴机器人
机器人及机器人组件——服务型机器人的性能标准与相应
测试方法——第
6
部分:用于下肢的便携式机器人
参考编号
ISO 18646-6:2026(英文版)
国际标准
ISO 18646-6
第一版:2026年
5月
◎ISO 2026
iii
ISO 18646-6:2026(英文版)
目录 页
前言........................................................................................................................................................... 伊夫
1范围..................................................................................................................................................... 1
2规范性参考文献................................................................................................................................. 1
3术语与定义......................................................................................................................................... 1
4测试条件............................................................................................................................................ 2
4.1 属;种类.............................................................................................................................................. 2
4.2 可穿戴机器人相关条件....................................................................................................................... 2
4.3 环境条件............................................................................................................................................... 3
4.4 运行条件.............................................................................................................................................. 3
5测试设备............................................................................................................................................ 3
5.1 ATDR 配置要求.................................................................................................................................. 3
5.2 ATDR大小........................................................................................................................................... 4
5.3 ATDR 信号测量条件.......................................................................................................................... 6
5.4 试验装置的安全考量.......................................................................................................................... 6
6测试准备............................................................................................................................................ 6
6.1 ATDR 行走参考轨迹........................................................................................................................... 6
6.1.1 ATDR 参考轨迹的配置.......................................................................................................... 6
6.1.2 ATDR行走参考轨迹的设计................................................................................................... 7
6.2 ATDR 半方差轨迹.............................................................................................................................. 8
6.2.1 ATDR 参考轨迹的配置.......................................................................................................... 8
6.2.2 ATDR半蹲参考轨迹的设计................................................................................................... 9
6.3 ATDR 控制性能要求........................................................................................................................ 10
6.4 可穿戴机器人性能评估指标............................................................................................................. 11
6.5 地面反作用力条件.............................................................................................................................13
7步行测试的检测方法.................................................................................................................................... 13
7.1 属;种类............................................................................................................................................. 13
7.2 测试设备............................................................................................................................................. 13
7.3 测试流程............................................................................................................................................ 14
7.3.1 测试原理................................................................................................................................ 14
7.3.2 空载行走试验........................................................................................................................16
7.3.3 负载行走试验........................................................................................................................ 18
8半蹲测试的检测方法.................................................................................................................................... 18
8.1 属;种类............................................................................................................................................ 18
8.2 测试设备............................................................................................................................................ 18
8.3 测试流程............................................................................................................................................ 19
8.3.1 测试原理................................................................................................................................ 19
8.3.2 无-负荷半蹲测试.................................................................................................................. 20
8.3.3 半蹲负荷训练........................................................................................................................ 21
9测试报告........................................................................................................................................... 21
参考文献...................................................................................................................................................... 24
◎ISO 2026——版权所有

ISO 18646-6:2026(英文版)
iv
前言
国际标准化组织(ISO)是一个由各国国家标准机构组成的全球性联合会(即ISO成员机构)。国
际标准的制定工作通常由ISO技术委员会负责开展。任何对特定领域感兴趣且该领域已设立技术委
员会的成员机构均有权派代表参与该委员会的工作。各类政府及非政府国际组织亦与ISO保持协
作,共同参与相关工作。在电气技术标准化领域的所有事务中,ISO均与国际电工委员会(IEC)
保持密切合作。
www.iso.org/directives
制定本文件所采用的程序以及用于后续维护的相关程序均在ISO/IEC指令第1部分中予以规定。特别需
注意不同类型ISO文件所需的不同批准标准。本文件依据ISO/IEC指令第2部分的编辑规则起草(详见
)。
www.iso.org/patents
ISO特此提醒:本文件的实施可能涉及使用(一项或多项)专利。ISO不对相关专利权利主张的证据、
有效性或适用性持任何立场。截至本文件发布之日,ISO已收到可能需要用于实施本文件的(一项或
多项)专利通知。但需注意,这些信息可能并非最新数据,可从 提供的专利数据库
中获取。ISO不对识别出的任何或全部此类专利权利承担责任。
本文档中使用的任何商品名称均为为方便用户而提供的信息,不构成认可。
www.iso.org/iso/foreword.
html
有关标准自愿性特征的说明、ISO中与合格评定相关的特定术语及表述含义,以及ISO在《技术性贸易
壁垒协定》(TBT)中遵循世界贸易组织(WTO)原则的相关信息,请参阅
。
本文件由ISO/TC 299机器人技术工作组编制。
ISO 18646系列的所有部件清单均可在ISO官方网站上查阅。
www.
iso.org/members.html
有关本文件的任何反馈意见或问题,请联系用户的国家标准化机构。这些机构的完整名单可查阅
。
CISO 2026 - 保留所有权利

摘要:
展开>>
收起<<
机器人技术——服务机器人的性能标准及相关测试方法第6部分:下肢可穿戴机器人机器人及机器人组件——服务型机器人的性能标准与相应测试方法——第6部分:用于下肢的便携式机器人参考编号ISO18646-6:2026(英文版)国际标准ISO18646-6第一版:2026年5月◎ISO2026iiiISO18646-6:2026(英文版)目录页前言......................................................................................................................................
声明:如果您的权利被侵害,请联系我们的进行举报。
相关推荐
-
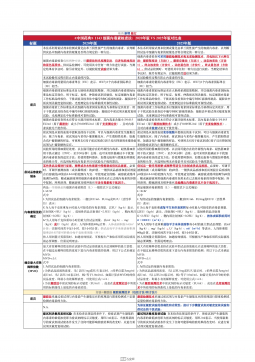
纯化水中国药典2020版与2025版GAP分析VIP免费
 2025-04-18 428
2025-04-18 428 -
无菌检查法对比表(2025版药典 VS 2020版药典)
 2025-09-27 703
2025-09-27 703 -
1101无菌检查法对比表(2025版药典 VS 2020版药典)
 2025-09-29 647
2025-09-29 647 -
1143 细菌内毒素检查法对比表(2025版药典 VS 2020版药典)
 2025-09-29 999+
2025-09-29 999+ -
TR-26-2025-Sterilizing-Filtration-of-Liquids液体的灭菌过滤(中英文对照版)VIP专享
 2025-11-06 587
2025-11-06 587 -
TR-26-2025-Sterilizing-Filtration-of-Liquids液体的灭菌过滤(英文版)VIP免费
 2025-11-06 206
2025-11-06 206 -
PDA-TR49-生物清洁验证-中英文翻译
 2025-11-19 257
2025-11-19 257 -
硫酸艾玛昔替尼片(CXHS2300097)说明书VIP免费
 2025-11-26 707
2025-11-26 707 -
PDA TR60 Process Validation A Lifecycle Approach 2026VIP免费
 2026-03-19 136
2026-03-19 136 -
美国药典 USP 2025〈62〉非无菌产品的微生物学检测:特定微生物的检测方法VIP免费
 2026-04-30 48
2026-04-30 48
作者:雨尘yc
分类:法规规范
价格:30质量币
属性:28 页
大小:1.45MB
格式:PDF
时间:2026-05-30